History of Robotics
The Idea of robots or mechanical creatures has been around since the mythological tales of Greek Gods’ mechanical servants or the Jewish and Norse legends of Clay Golems thousands of years BC, however, the first real robot was documented in the 4th Century BC. The Greek mathematician Archytas created a mechanical wooden, steam-operated bird called “the pigeon”. A jet of steam or compressed air controlled the movements of the pigeon. This machine was, also, one of the earliest studies of flight.
In around 270BC, the Greek inventor Ctesibus designed water clocks with moveable figures. The force of the water moving through at a constant rate controls these. At this time, automata of all kinds fascinated the Greeks.
Later, in approximately 100AD, Hero of Alexandria designed automata that opened the gates on hydraulic principles.
The First Humanoid Robot
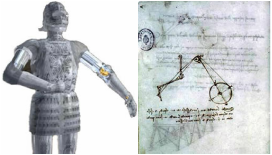
Robot and design by
Leonardo Da Vinci
In approximately 1495, Leonardo Da Vinci designed and possibly built the first humanoid robot. This armoured robot knight was designed to sit up, wave its arms, and move its head via a flexible neck while opening and closing its jaw. It may have made sounds to the accompaniment of automated drums.
In 1942, Isaac Asimov popularized the term “robotics” by mentioning it in his book Runaround
He also created the three laws of robotics:
1. A robot may not injure a human being, or, through inaction, allow a human being to come to harm.
2. A robot must obey the orders given it by human beings except where such orders would conflict with the First Law.
3. A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
He also created the three laws of robotics:
1. A robot may not injure a human being, or, through inaction, allow a human being to come to harm.
2. A robot must obey the orders given it by human beings except where such orders would conflict with the First Law.
3. A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
In 1950, Alan Turing published his paper called Computing Machinery and Intelligence to determine whether or not a machine has gained the ability to think for itself. This became known as the Turing Test.

Then, in 1961, Heinrich Ernst developed a computer operated mechanical hand. This sequenced and stacked hot pieces of die cast metal. This paved the way for robots in industry.
In 1996, Honda unveiled the P-2 (prototype 2), a humanoid robot that can walk, climb stairs and carry loads.

The first node of the International Space Station was placed in orbit in 1997. Over the next several years more components will join it, including a robotic arm.

In the year 2000, Honda showcased a new humanoid robot ASIMO, the next generation of its series of humanoid robots. Honda's Asimo was the first robot that could walk independently with relatively smooth movements and could climb the stairs.
What does this Prove?
This proves that robots are constantly evolving from mere myths and ideas into real structures and working machines. There has been a considerable number of breakthroughs during the last century which shows that the rate of development is also increasing. Humanoid robots are the forefront of scientific research and development. This may mean that the next stage is conscious humanoid robots.
